
Page 39 - BP_201909
P. 39
[内容创作Creation]
(2)上位机协同控制 标,如果是跟踪目标,则更新目标的位置信息,同时重新初
模块实施方式: 始化相关和滤波跟踪算法的模型。在人物存在交叉时,如果
上位机主要完成设备状 跟踪目标从其他人物前方交叉,则不受影响,如果其他人物
态的感知分析和目标跟踪算 从目标前方交叉,短时间内可以做到不受影响。参见图4。
法、路径规划和驱动控制。 (4)协同计算、执行控制模块实施方式
其次,为了给场景平台提供 使用不同的接口方式实现与摄像机、机器人(包含云
透明的场景,需要将场景的 台)的链接;封装机器人、摄像机两种不同接口的通信协
多维度参数使用协同运动规 议。定义和实现对摄像机的多维度(如:摄像机的位置、姿
划的算法转化为设备的参数 态等)动作驱动控制,将上层送来的多维规划信息与目前的
控制指令,需要根据目前状 状态信息计算后,形成多维执行单元的控制指令和参数。设
态参数与规划的场景计算出 备的参数感知包括:实时感知到设备的多维度(如摄像机的
的不同维度的控制指令。考 俯仰角度、水平角度、焦距等参数)状态信息;将传感器感
虑到协同控制和机器人、摄 测到的距离直接作用于人体目标跟踪软件;多维输入输出的
像机的独立性,上位机协同 协同运动规划,将视频目标跟踪、路径规划、场景示例学习
控制/感知模块采用独立进 等来自于场景规划层面的多维度轨迹,使用不同的场景模型
程,与新松控制台软件和场 进行计算,然后做分维和转维处理,传输给协同控制模块,
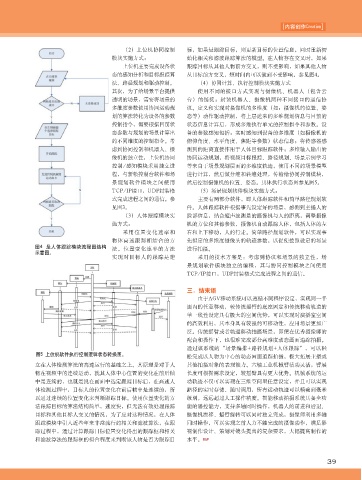
景规划软件模块之间使用 然后控制摄像机的位置、姿态。具体执行状态图参见图5。
TCP/IP接口,UDP封装格 (5)场景规划软件模块实施方式:
式完成进程之间的通信。参 主要有两部分软件,即人体跟踪软件和简单路径规划软
见图3。 件。人体跟踪软件根据事先设定好的场景,感测到主播人的
(3)人体跟踪模块实 脸部信息,结合超声波测量的摄像机与人的距离,调整摄像
施方式: 机的方位和其他参数,摄像机自动跟踪人体,包括人体的左
采用位置变化速率和 右和上下移动,人的行走。简单路径规划软件,可以实现事
物体高速跟踪相结合的方 先拟定的多维度摄像头的轨迹参数,以促使按照设定的场景
图4 是人体跟踪模块流程图结构 法。位置变化速率的方法 进行拍摄。
示意图。
实现对目标人的跟踪是建 采用的技术方案是:考虑到协议和场景的独立性,场
景规划软件模块独立的编程,其与协同控制模块之间使用
TCP/IP接口,UDP封装格式完成进程之间的通信。
三.结束语
由于AGV移动系统可以遵循不同程序设定,实现同一平
面内的任意移动,较传统摇臂的底座固定和传统移动轨道的
单一线性设定具有极大的空间优势,可以实现对演播室空间
的高效利用,其本身具有较强的可移动性,应用场景更加广
泛。传统摇臂或者轨道移动拍摄场景,即便在优秀摄像师的
配合和操作下,也很难完成部分高难度动态画面追踪拍摄。
通过该系统的“场景编排+路径规划+人体跟踪”,可以轻
图5 上位机软件执行控制逻辑状态转换图。 松完成以人物为中心的动态画面追踪拍摄,极大拓展主播或
立在人体检测算法的高速运行的基础之上。其原理是对于人 其他拍摄对象的表现能力。六轴工业机械臂活动灵活,臂展
物在视频中的连续运动,就其人体中心位置的变化在前后帧 长度可根据需求设定,较摇臂具有更大优势。机械系统的运
中是连续的,也就是说在画面中选定跟踪目标后,在高速人 动轨迹不仅可以实现在三维空间里任意设定,并且可以实现
体检测过程中,目标人的位置变化在前后帧中是连续的,所 路径的实时存储、随时调用,所有运动轨迹可以精确到毫米
以通过连续的位置变化来判断跟踪目标。使用位置变化的方 级别,远远超过人工操作精度。智能移动拍摄系统具备全功
法跟踪目标的算法结构简单,速度快,但无法有效处理跟踪 能的遥控能力,支持多轴同时操作,机器人的前进和后退、
目标和其他目标人交叉的情况,为了应对这种情况,在人体 摄像机漂移、摇臂旋转可以同时独立完成,摄像师利用多轴
跟踪模块中引入近些年来非常流行的相关和滤波算法,在跟 同时操作,可以实现之前人力不能完成的摄像动作,满足影
踪过程中,通过计算跟踪目标位置变化得出的跟踪框和相关 视制作设计、策划对镜头提出的复杂要求,大幅提高制作的
和滤波算法的跟踪框的拟合程度来判断该人物是否为跟踪目 水平。B&P
39