
Page 38 - BP_201909
P. 38
[内容创作Creation] [内容创作Creation]
机镜头控制模块根据收到的控制指令调整镜头的各项参数。
主控模块实现上述功能模块的消息同步与协同控制,通过消
息机制无延迟收发信息,使机器人完成拍摄任务,也为后续
模块升级和功能扩展提供了接口。
3.主要功能特点
该系统具有精准拍摄、拍摄主体跟踪、无轨移动、微距
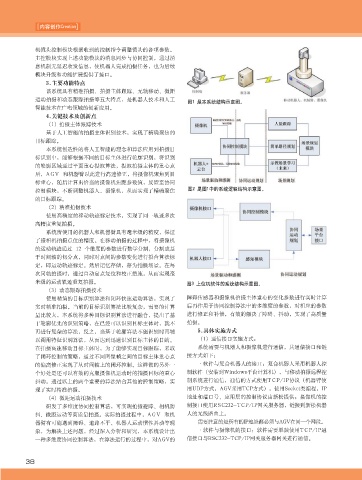
运动拍摄和动态跟踪拍摄等五大特点,是机器人技术和人工 图1 是本系统结构示意图。
智能技术在广电领域的创新应用。
4.关键技术及创新点
(1)拍摄主体跟踪技术
基于人工智能的拍摄主体识别技术,实现了精确聚焦的
目标跟踪。
本系统创造性的将人工智能的理念和算法应用到拍摄目
标识别中,能够根据不同的目标主体进行轮廓识别,将识别
的轮廓区域通过平面重心提取算法,提取拍摄主体的重心点
后,AGV 和机器臂以此进行高速修正,将摄像机聚焦到目
标重心,随后计算出恰当的摄像机焦距参数值,反馈至协同
控制模块,不断调整机器人、摄像机,从而实现了精确聚焦 图2 是图1中的系统逻辑结构示意图。
的目标跟踪。
(2)精准拍摄技术
使用高精度的移动轨迹标定技术,实现了同一轨迹多次
高精度重复拍摄。
系统所使用的机器人和机器臂具有毫米级的精度,保证
了摄相机拍摄点位的精度。在移动拍摄的过程中,将摄像机
的运动轨迹通过 12 个维度的参数进行数学分割,分割成基
于时间轴的切分点,同时对点间的参数变化进行拟合算法标
定,即运动轨迹标定。然后记忆存储,存为拍摄场景。在每
次同轨拍摄时,通过自动定点复位和校正措施,从而实现毫
米级的运动轨迹重复拍摄。 图3 上位机软件的系统结构示意图。
(3)动态跟踪拍摄技术
使用精简的目标识别算法和闭环快速运动算法,实现了 障碍传感器和摄像机拍摄主体重心的变化参数进行实时计算
实时精准拍摄。当前的目标识别算法比较复杂,需要的计算 后再作用于协同控制算法中的多维度的参数,对相应的参数
量比较大,本系统将多种目标识别算法进行融合,提出了基 进行修正和补偿,有效的解决了障碍、抖动,实现了高质量
于轮廓优先的识别策略,在已经可以识别目标主体时,就不 拍摄。
再进行复杂的算法,反之,当基于轮廓算法不能识别时再辅 5.具体实施方式
以调用特征识别算法,从而达到迅速识别目标主体的目的。 (1)通信接口实施方式:
在拍摄高速移动目标主体时,为了能够实现目标跟踪,采取 系统需要与机器人和摄像机进行通信,其通信接口和链
了闭环控制的策略,通过不同图像帧之间的目标主体重心点 接方式如下:
的偏离修正实现了从时间轴上的闭环控制。这样做的另外一 ·软件与复合机器人的接口:复合机器人采用机器人控
个好处是还可以有效的克服摄像机运动时的拍摄目标的重心 制软件(安装到Windows平台计算机),与移动拍摄远程控
抖动。通过以上的两个重要的算法结合其他的控制策略,实 制系统进行通信,通信的方式使用TCP/IP协议(机器臂使
现了实时精准拍摄。 用UDP方式,AGV采用TCP方式),使用Socket类编程,IP
(4)微距运动拍摄技术 地址和端口号、应用层的控制协议由新松提供;摄像机的控
研发了多维度协同控制算法,可实现拍摄避障、相机防 制接口使用RSC232-TCP/IP网关服务器,链接到新松机器
抖、微距运动等高质量拍摄。实际拍摄过程中,AGV 和机 人的无线路由上。
器臂有可能遇到障碍、道路不平、机器人运动惯性抖动等现 需要注意的是所有的IP地址都必须与AGV在同一个网段。
象,为解决上述问题,经过深入分析和研究,本系统设计出 ·软件与摄像机的接口:软件需要单独使用TCP/IP通
一种多维度协同控制算法,在算法运行的过程中,对AGV的 信接口与RSC232-TCP/IP网关服务器网关进行通信。
38