
Page 41 - BP_202009
P. 41
(5)此时,从时钟便拥有了t1~t4这四个时间戳,由此可
计算出主、从时钟间的往返总延时为[(t2–t1)+(t4–t3)],由于
网络是对称的,所以主、从时钟间的单向延时为[(t2–t1)+(t4–
t3)]/2。因此,从时钟相对于主时钟的时钟偏差为:Offset=(t2–
t1)-[(t2–t1)+(t4–t3)]/2=[(t2–t1)-(t4–t3)]/2。
此外,根据是否需要发送Follow_Up报文,请求应答机制
又分为单步模式和双步模式两种:
•在单步模式下,Sync报文的发送时间戳t1由Sync报文
自己携带,不发送Follow_Up报文。
•在双步模式下,Sync报文的发送时间戳t1由Follow_Up
报文携带。
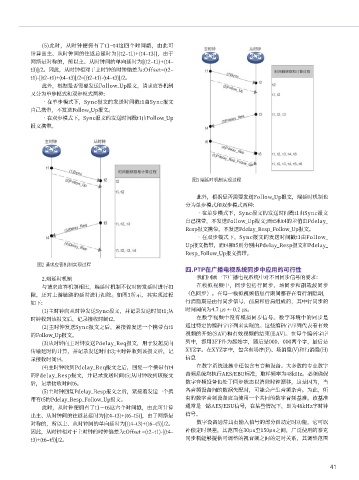
图3 端延时机制实现过程
此外,根据是否需要发送Follow_Up报文,端延时机制也
分为单步模式和双步模式两种:
•在单步模式下,Sync报文的发送时间戳t1由Sync报文
自己携带,不发送Follow_Up报文;而t5和t4的差值由Pdelay_
Resp报文携带,不发送Pdelay_Resp_Follow_Up报文。
•在双步模式下,Sync报文的发送时间戳t1由Follow_
Up报文携带,而t4和t5则分别由Pdelay_Resp报文和Pdelay_
Resp_Follow_Up报文携带。
图2 请求应答机制实现过程
四.PTP在广播电视系统同步中应用的可行性
2.端延时机制 我们回顾一下广播电视系统中对不同同步信号的要求:
与请求应答机制相比,端延时机制不仅对转发延时进行扣 在模拟视频中,同步包括行同步、场同步和副载波同步
除,还对上游链路的延时进行扣除。如图3所示,其实现过程 (色同步)。在每一模拟视频信息行期间都存在着行消隐期,
如下: 行消隐期是由行同步信号、前肩和后肩组成的,其中行同步的
(1)主时钟向从时钟发送Sync报文,并记录发送时间t1;从 时间阈值为4.7 μs +- 0.2 μs。
时钟收到该报文后,记录接收时间t2。 在数字视频中没有模拟同步信号。数字环境中的同步是
通过特定的编码字序列来实现的。这些编码字序列代表着有效
(2)主时钟发送Sync报文之后,紧接着发送一个携带有t1
的Follow_Up报文。 视频的开始(SAV)和有效视频的结束(EAV)。在每个编码字序
(3)从时钟向主时钟发送Pdelay_Req报文,用于发起反向 列中,都用3FF作为起始字,随后是000、000两个字,最后是
传输延时的计算,并记录发送时间t3;主时钟收到该报文后,记 XYZ字。在XYZ字中,包含有场序(F)、场消隐(V)和行消隐(H)
录接收时间t4。 信息
(4)主时钟收到Pdelay_Req报文之后,回复一个携带有t4 在数字系统设施中还包含有音频设备。大多数的专业数字
的Pdelay_Resp报文,并记录发送时间t5;从时钟收到该报文 音频系统均执行AES/EBU标准,取样频率为48kHz。必须确保
后,记录接收时间t6。 数字音频设备也处于同步状态以消除时钟漂移,这是因为,当
(5)主时钟回复Pdelay_Resp报文之后,紧接着发送一个携 各音频设备间的数据失配时,可能会产生音频杂音。为此,所
带有t5的Pdelay_Resp_Follow_Up报文。 有的数字音频设备应当使用一个共同的数字音频基准。该基准
通常是一路AES/EBU信号,在某些情况下,即为48kHz字时钟
此时,从时钟便拥有了t1~t6这六个时间戳,由此可计算
出主、从时钟间的往返总延时为[(t4–t3)+(t6–t5)],由于网络是 信号。
对称的,所以主、从时钟间的单向延时为[(t4–t3)+(t6–t5)]/2。 数字设备通常具有输入信号的部分自动定时功能,它可以
补偿定时误差,其范围在30μs至150μs之间,广泛使用的泰克
因此,从时钟相对于主时钟的时钟偏差为:Offset =(t2–t1)-[(t4–
t3)+(t6–t5)]/2。 同步机能够提供可调整的视音频之间的定时关系,其调整范围
41